Multi-Entry-Exit Detectors (E3)
Instantiating within the Simulation#
Multi-Entry-Exit Detectors are defined within an additional-file which has to be loaded by the simulation.
The descriptions of Multi-Entry-Exit Detectors has to include the set of entry- and the set of exit-cross-sections. Due to this, it is not possible to use a single tag to specify a detector. Instead, the description consists of the following parts:
- A beginning tag that describes some global attributes of the detector just as the descriptions of inductive loop detectors and areal detectors do.
- A set of tags that describe the detector's entry points.
- A set of tags that describe the detector's exit points.
- A closing tag that must match the opening tag.
The definition:
<additional>
<entryExitDetector id="<ID>" period="<AGGREGATION_TIME>" file="<OUTPUT_XMLFILE>"
timeThreshold="<FLOAT>" speedThreshold="<FLOAT>">
<detEntry lane="<LANE_ID1>" pos="<POSITION_ON_LANE>" friendlyPos="<BOOL>"/>
<detEntry lane="<LANE_ID2>" pos="<POSITION_ON_LANE>" friendlyPos="<BOOL>"/>
<detExit lane="<LANE_ID1>" pos="<POSITION_ON_LANE>" friendlyPos="<BOOL>"/>
<detExit lane="<LANE_ID3>" pos="<POSITION_ON_LANE>" friendlyPos="<BOOL>"/>
... further entries ...
</entryExitDetector>
</additional>
will build a Multi-Entry-Exit Detector starting at either lane "LANE_ID1" or "LANE_ID2" and end at the same lane of "LANE_ID1" or "LANE_ID3". All values will aggregated over a time of "AGGREGATION_TIME" seconds. They will be written into the file "OUTPUT_XMLFILE" lying in the sub folder of the folder the configuration was read in/the program has been started within.
Attributes#
The complete list of attributes is:
| Attribute Name | Value Type | Description |
|---|---|---|
| id | id (string) | A string holding the id of the detector |
| file | filename | The path to the output file. The path may be relative. |
| period (alias freq) | int | The aggregation period the values the detector collects shall be summed up (default: whole simulation time). |
| timeThreshold | float | The time-based threshold that describes how much time has to pass until a vehicle is recognized as halting; in s, default: 1s. |
| speedThreshold | float | The speed-based threshold that describes how slow a vehicle has to be to be recognized as halting; in m/s, default: 5/3.6m/s. |
| openEntry | bool | If set to true, no error will be reported if vehicles leave the detector without first entering it. This can be useful when tracking vehicles for a particular combination of entry and exit lane at an intersection and other vehicles may also use the exit lane. default: false. |
| expectArrival | bool | Whether no warning should be issued when a vehicle arrives within the detector area. default: false. |
| vTypes | string | space separated list of vehicle type ids to consider, "" means all; default "". |
| nextEdges | stringList | list of edge ids that must all be part of the future route of the vehicle to qualify for detection (default empty) |
| detectPersons | string | detect persons instead of vehicles (pedestrians or passengers) |
Generated Output#
A single data line within the output of a simulated Multi-Entry-Exit Detector looks as following:
<interval begin="<BEGIN_TIME>" end="<END_TIME>" id="<ID>" meanTravelTime="<MEAN_TT>"
meanOverlapTravelTime="<MEAN_OVERLAP_TT>" meanSpeed="<MEAN_SPEED>"
meanHaltsPerVehicle="<MEAN_HALT_NUMBER>" vehicleSum="<#VEHICLES>" meanSpeedWithin="<MEAN_SPEED>"
meanHaltsPerVehicleWithin="<MEAN_HALT_NUMBER>" meanDurationWithin="<MEAN_HALT_DURATION>"
vehicleSumWithin="<#VEHICLES>" meanIntervalSpeedWithin="<MEAN_SPEED>"
meanIntervalHaltsPerVehicleWithin="<MEAN_HALT_NUMBER>" meanIntervalDurationWithin="<MEAN_HALT_DURATION>"/>
As for lane area detectors, the measures generated by Multi-Entry-Exit Detector may be grouped by the way they are computed. The plain measures take only those vehicles into account that have left the detector area within the described interval. Additionally, measures of the vehicles that are still inside the area are generated (postfix "Within"), containing both measures valid for the whole ride through the area and measures made up of only those samples that were collected within the current interval ("...Interval..."). The value are described one by one in the following table.
| Name | Type | Description |
|---|---|---|
| begin | (simulation) seconds | The first time step the values were collected in |
| end | (simulation) seconds | The last time step + DELTA_T the values were collected in (may be equal to begin) |
| id | id | The id of the detector |
| meanTravelTime | s | The time vehicles needed to pass the area (the crossing of the vehicle front counts). Averaged over all vehicles which left the detector completely during the interval duration. |
| meanOverlapTravelTime | s | The time vehicles needed to pass the area (any time a part of the vehicle was in the detection range counts). Averaged over all vehicles that have left the detector completely during the interval duration. |
| meanSpeed | m/s | The mean speed of vehicles that have passed the area. Averaged over the interval and vehicles (also known as time-mean speed) |
| meanHaltsPerVehicle | # | The number of halts of vehicles that have passed the area. Averaged over all vehicles that have left the detector during the interval duration. |
| meanTimeLoss | s | The average time loss for all vehicles that have passed the area. |
| vehicleSum | # | The number of vehicles that have left the area during the interval. |
| meanSpeedWithin | m/s | The mean speed of those vehicles that have entered, but not yet left the area. Averaged over the time each vehicle was in the area and vehicles. |
| meanHaltsPerVehicleWithin | m/s | The mean number of haltings of those vehicles that have entered, but not yet left the area. Averaged over the time each vehicle was in the area and vehicles. |
| meanDurationWithin | s | The mean duration within the area of those vehicles that have entered, but not yet left the area. Averaged over the time each vehicle was in the area and vehicles. |
| vehicleSumWithin | s | The number of vehicles that have entered but not yet left the area. |
| meanIntervalSpeedWithin | m/s | The mean speed of those vehicles that have entered, but not yet left the area, collected during the written interval. Averaged over the interval and vehicles. |
| meanIntervalHaltsPerVehicleWithin | # | The number of halts per vehicles that have entered, but not yet left the area, collected during the written interval. Averaged over the vehicles. |
| meanIntervalDurationWithin | s | The mean duration within the area of those vehicles that have entered, but not yet left the area, collected during the written interval. Averaged over the vehicles. |
| meanTimeLossWithin | s | The average time loss collected by vehicles that have entered but not yet left the area during the written interval. |
Visualization#
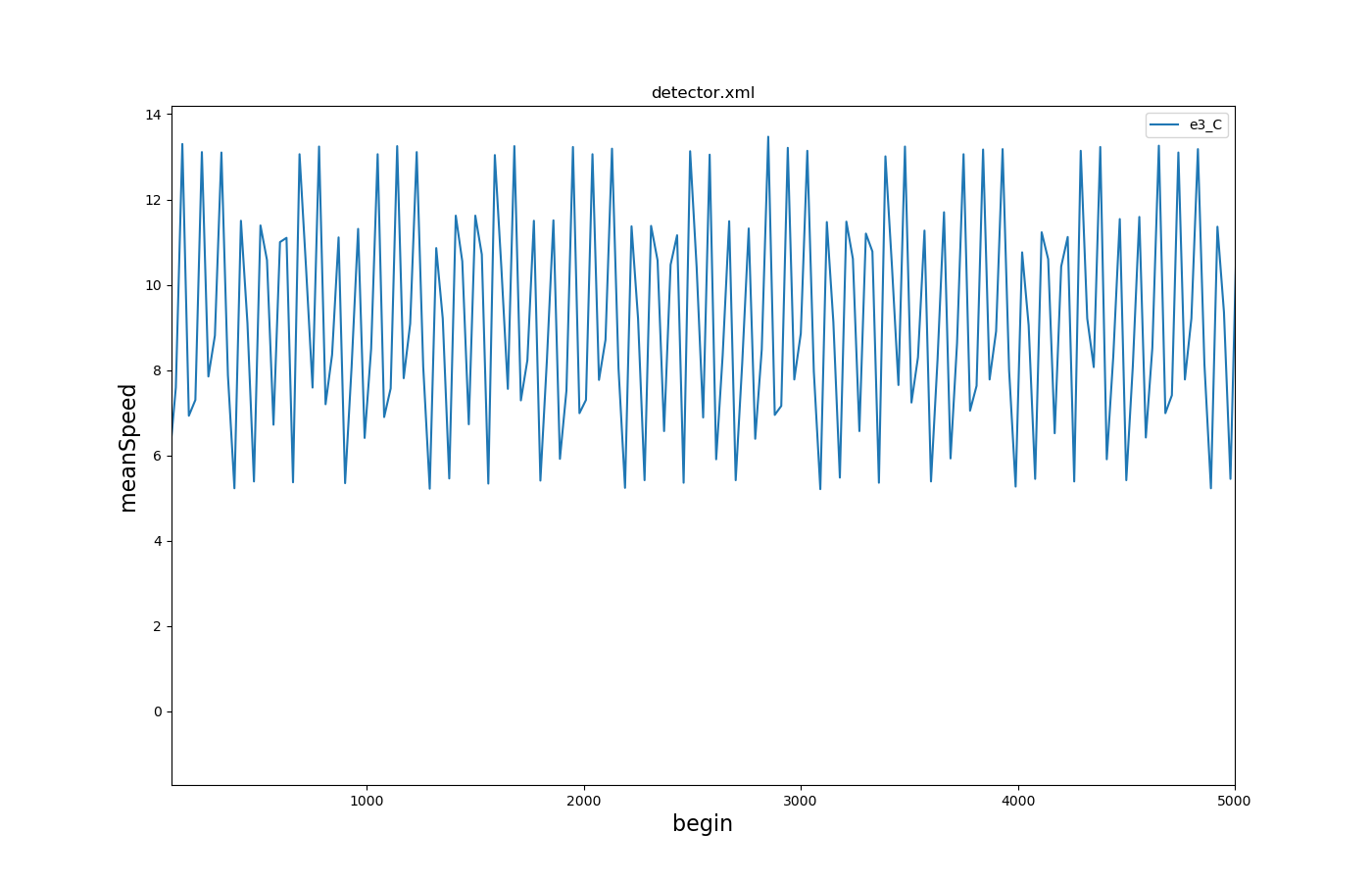
Output can be represented using plotXMLAttributes, see there for details.
Further Notes#
- All measurements concerning durations refer to the end of the relevant interval
- Simulated multi-entry-exit detectors can be accessed using
TraCI. If no XML output is
needed, the attribute
file="NUL"may be used. - You can generate detector definitions automatically. See output tools for more information.
- The simulation does not check whether the area defined by the
detector entries and exits is really closed, so if you keep getting
warnings about vehicles leaving the area which did not enter (or
vice versa) check whether your entries and exits really cover all
possible lanes.
- The same applies for vehicles starting or ending the route (or teleporting) inside the area surrounded by the entries and exits. They are not considered by the measurements and will potentially generate warnings (when leaving without entering or by ending their route)
- The detector interpolates entry and exit times, so if a vehicle has at time 10 the position 95 and at time 11 the position 105 with a detector entry being at position 100, 10.5 is recorded as entry time (and used in the subsequent calculations also for the mean speeds).
- If you use small detector intervals (down to the time step length) the interpolation behavior may result in discretization errors. In the example above the vehicle will have not been recorded in the interval [10,11) because it actually moves into the detector at step 11 only, but will have a duration of 1.5 inside the detector (meanDurationWithin, meanIntervalDurationWithin) for the next interval [11,12).
- If a vehicle happens to be placed exactly on the entry position it is not counted yet because for the calculation of a speed we need a non zero movement inside the detector.